a
Antenna Control Software Design using the Power PMAC
- draft1 2009/9/1 jva -
Contents:
Introduction
S-Pol and CHILL are using the Delta Tau Power PMAC motion controller for controlling each radar's antenna. The Power PMAC runs embedded an real-time Linux operating system which supports real-time tasks, Delta Tau's motion control programs (implemented in Delta Tau's scripting language) as well as general purpose (non-realtime) C/C++ Linux tasks.
Communication between Radar Control Task and Power PMAC
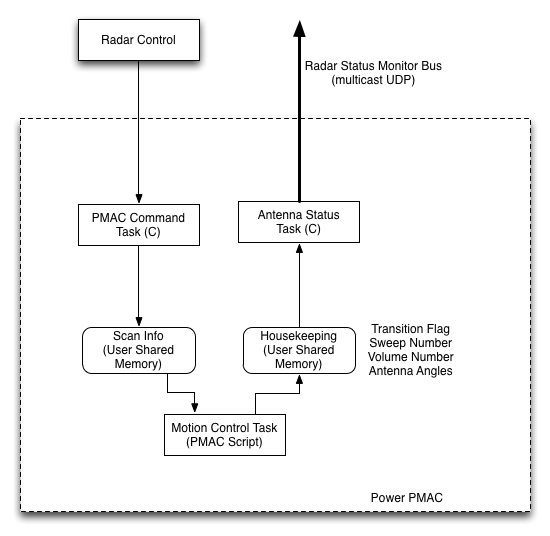
The Radar Control task sends a iwrf_scan_segment structure in Intel binary format to the Power PMAC over a TCP socket. A command task on the Power PMAC receives this message, byte-swaps it for the Power PC, and places it in the Power PMAC User Shared memory area. After decoding the iwrf_scan_segment structure, the communications task immediately starts a motion control program (written in Delta Tau's scripting language) to peform the requested scan. As the motion control program task runs, it increments sweep counts and updates transition flags in shared memory. An Antenna Status task regularly reads the Delta Tau User shared memory, and sends out multicast packets containing the antenna angles, sweep count, volume count, and transition flag. When the motion control task complets the scan, the Antenna Status task sends a multicast message containing "End of Scan". When the Radar Control task receives the "End of Scan" message, it will send the next iwrf_scan_segment structure.